Hi. I'm a junior at Olin College of Engineering studying mechanical engineering interested in the electric vehicle, biomedical, clean energy, and robotics fields. I love to bring projects from ideas to reality, integrating design, analysis, and manufacturing in my holistic approach to engineering.
Feel free to look around and read more about some of the projects I've worked on at Olin. You can find a link to my resume detailing my experience at the top of the page, and my contact information is down below.
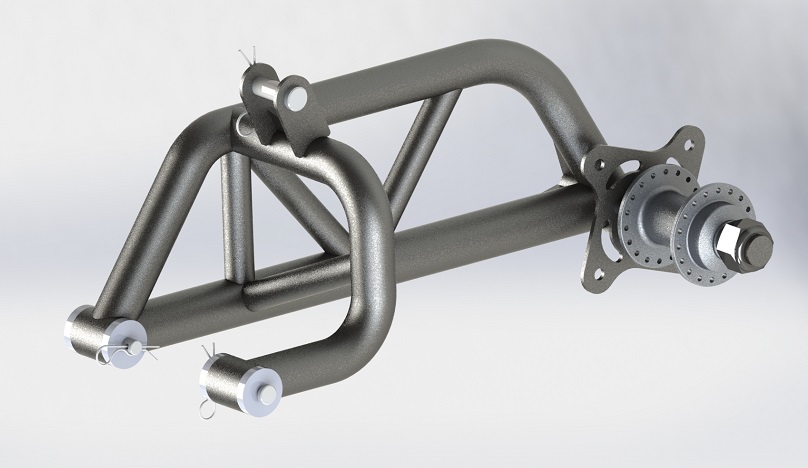
Dualsport Electric Reverse Trike Suspension Design
Inspired to quickly design and create an electric vehicle, Olin's electric vehicle team REVO created an electric reverse trike, rugged enough to go off road but smooth enough for drives around town as a road-legal car. A member of chassis subteam, I led the design of our trike's suspension. I used Solidworks sketches, design tables, and knowledge of vehicle dynamics to design suspension geometry suitable for all road conditions before beginning work on the rear swing-arm. As a self-imposed challenge I worked on a single-sided swing arm, aiming to create an aesthetically pleasing piece that offered easier maintenance and manufacturability. Design was complicated by limited manufacturing capabilities on-campus, the high stresses exerted on the cantilevered spindle under off-road conditions, and the ever-present need for light and cheap parts. Due to separate swing-arm pivot and motor axes, I had to design a dynamic chain tensioner as well, constantly applying force to the chain driving the rear wheel.
Though I could turn and mill my parts with stock on hand, complications with our tube vendor prevented us from receiving the crucial bent swing-arm members. Nevertheless, with some quick design, FEA, and several hours in the shop, I soon had parts and drawings in the hands of our welders. Though the single sided swing-arm concept was unfortunately abandoned, the completed, more conventionally designed system is stronger and functions as desired.
Subteam:
10
Date:
Spring 2014 - Fall 2014
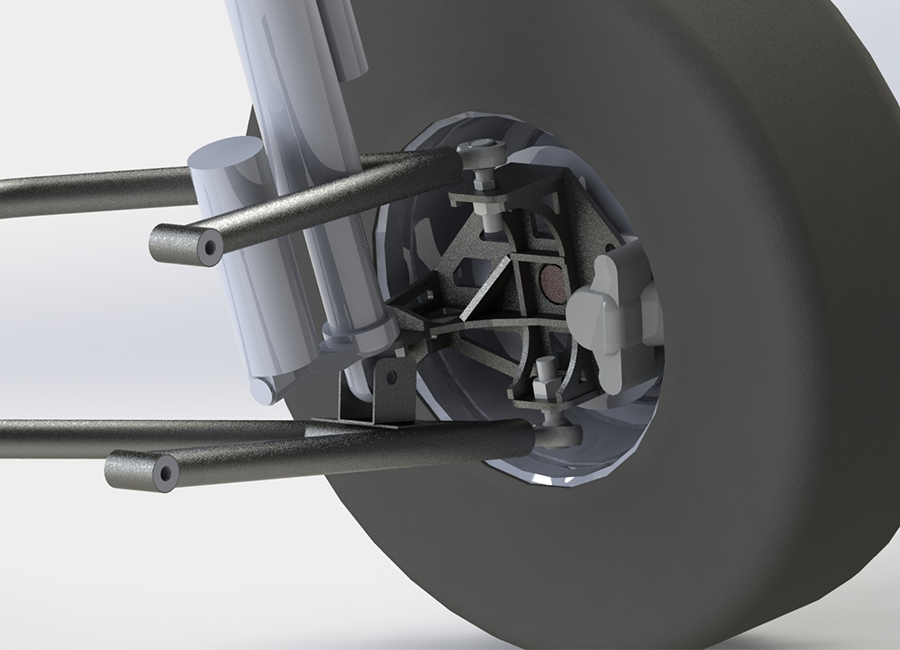
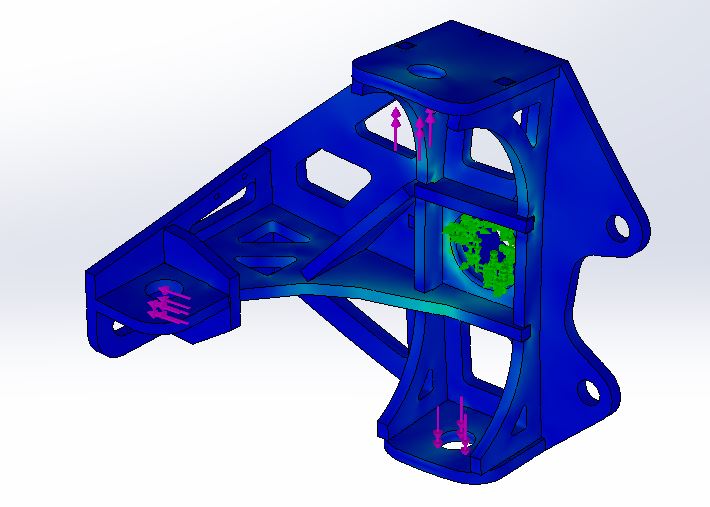
MiniBaja Suspension Geometry and Knuckle Design
I have been a suspension subteam member of Phoenix Racing, Olin's MiniBaja team, for two years. Coming into Baja with limited car or mechanical engineering experience, the team offered a strong introduction to vehicle dynamics and engineering procedure. My first project was the development of the car's suspension geometry. Aiming to handle the rugged Baja off-road competition, my design needed to similarly be robust enough to handle a variety of road conditions while maintaining driver control. The suspension geometry needed further integration with our frame and steering systems, prompting my design of suspension mounting tabs and geometry suitable for steering under bumpy conditions.
I also designed the front knuckles for the Baja car. The design centered around three limiting factors: our desired suspension geometry, excessive strength, and limited manufacturing capabilities. Connecting the car's suspension and steering to the front wheel, the knuckle first needed to actually follow the predefined geometry for our desired characteristics. Due to the heavy dynamic loading of driving offroad, the front knuckles especially needed a high factor of safety, allowing failure in the more easily replaceable tie-rods or A-arms first. Our imprecise sheet metal braking facilities also constrained the design to welded plate steel, leading to my self-jigging knuckle set up perfectly for welding.
Subteam:
6
Date:
Fall 2013
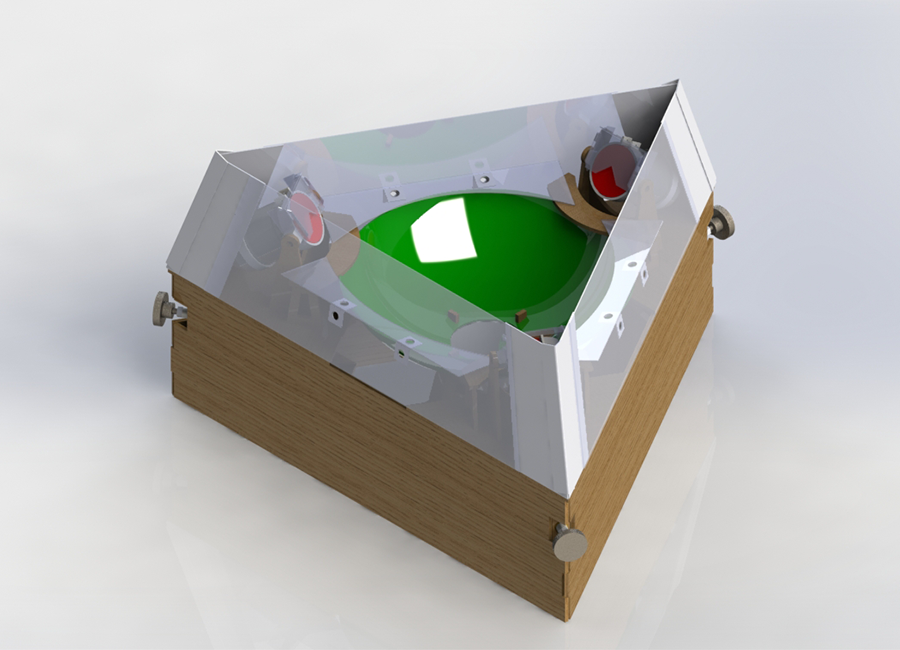
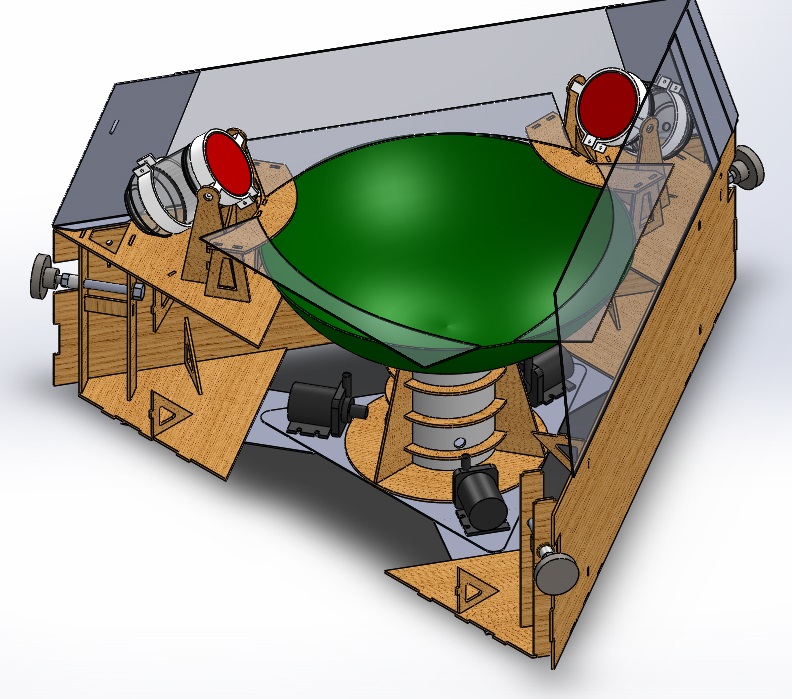
Laminar Flow Fountain Mechanical Design
My team designed a laminar flow fountain with audio-visual response for an engineering class, aiming to create a project integrating significant mechanical, electrical, and programming components. I primarily worked on the mechanical design and manufacturing of the waterproofed, recycling system. To keep the project reasonable within our budget of $250, we fit the entire system in a small tabletop display. The core of the project was the construction of three laminar flow nozzles, filtering turbulent flow from a pump to create smooth, aesthetic laminar flows. After some calculations to characterize small scale laminar flow, we managed to design and build effective laminar flow nozzles using low-cost components. I additionally worked on our enclosure, hiding and waterproofing the music-response circuitry and water pumps below the fountain, leaving the top open with clear panels and adjustable-angle nozzles.
Team:
4
Date:
Fall 2013
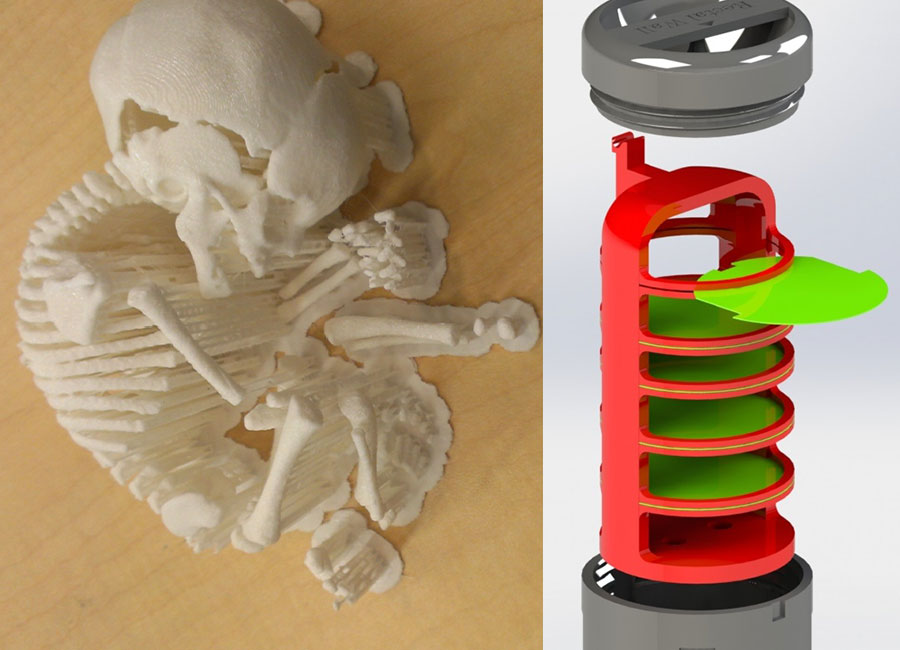
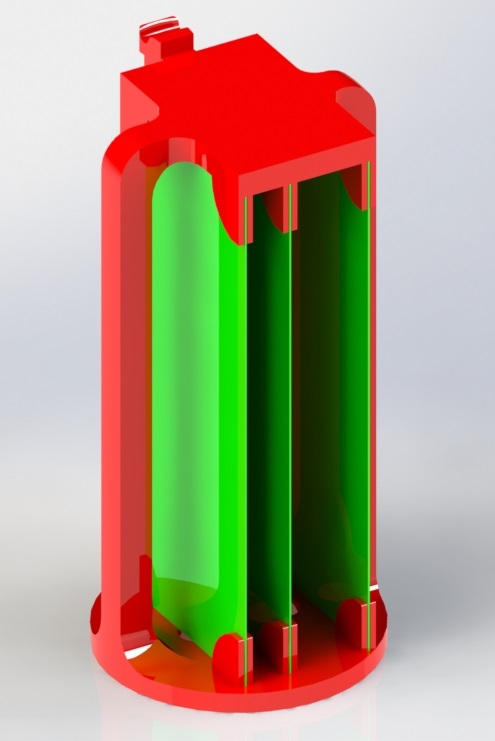
Biomedical CAD & 3D Printing
During the Fall semester of junior year, I did research on converting biomedical models into 3d printed models. Biomedical students and doctors may not have access to real life anatomical models, such as fetal skeletons. 3d printing's capabilities to print fairly accurate one-off objects perfectly suits that problem, giving medical personnel access to physical models. I worked on converting medical scan data into printable models, combining 2d scans, processing them, and optimizing them for prints. Further challenges involved printing complex fragile structures with minimal supports, keeping the core model visible without too much fragility.
My current project involves the use of scale models of patient tumor scans to model and verify radiation treatment plans, creating a system easily adaptable to multiple patients. Working with the CyberKnife radiosurgery system, custom 3d-printed parts provide easily manufacturable one-off scale models of patient organs and tumors, enabling calibration of the machine with the model. The inserts and canister assembly shown here allow for an easy to use system for verifying that treatment with radiation film placed along key planes. From a previous team's preliminary design, I focused on making the system reusable and simple to use. I used varying tolerances to minimize friction except for the sealed water cap, ensuring a tight seal without difficulties in assembly. Ergonomics and both strength and stiffness requirements governed the rest of the design, leading to the current iteration of the system.
Team:
1
Date:
Fall 2014 - Current
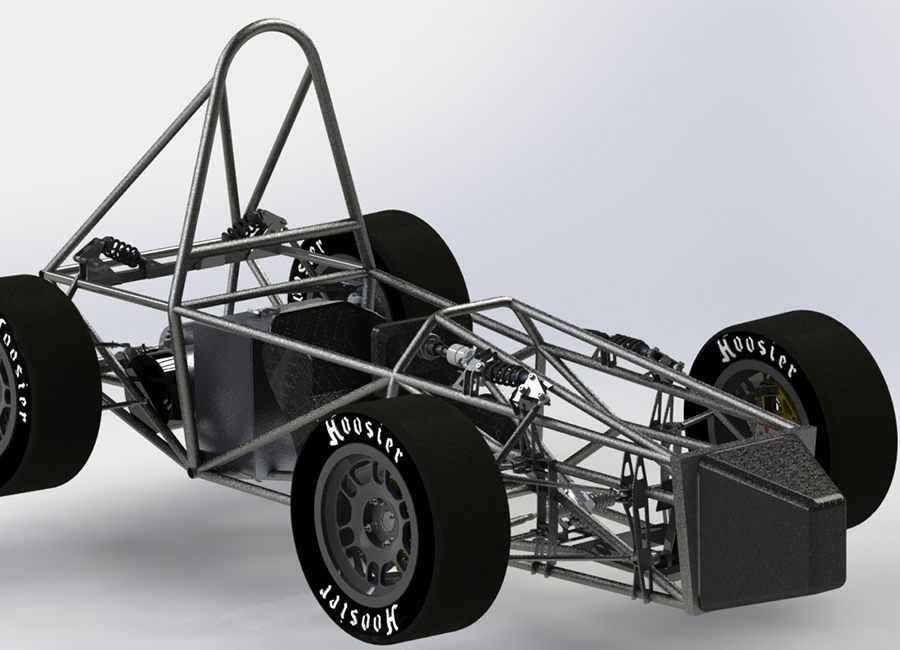
Mechanical Lead, Formula SAE Electric Team
By far my largest project so far is the development of a Formula SAE Electric racecar. This year is our school's first ever look into Formula, so we are starting the car's design from nothing, an ambitious project for an extracurricular team of undergraduates. My work as leader for our mechanical subteam covers a variety of responsibilities, firstly making final decisions on all mechanical projects on the car. I have needed to look at a variety of projects across the car, such as a carbon fibre monocoque or multi-link suspension, and determine which are suitable for our team's scope. More complicated projects offer benefits for team member education and car performance, but similarly require machining time, tooling and facilities, tolerance limits, cost, design time, and more.
In addition to deciding projects and reevaluating them as we learn more, I work closely with the various members of the team, teaching them about their subsystems, promoting individual design work, and reviewing their designs with them. I have also needed to manage our part database and structure, introduce and review Solidworks part and drawings to new team members, and manage top level assemblies and subsystem integration, both within mechanical subsystems and with our electrical subteams. As we move into fabrication of the car, much of my time will be divided among TIG welding the frame and machining assorted parts, managing overall drawing production and fabrication, and beginning preliminary design for our future car.
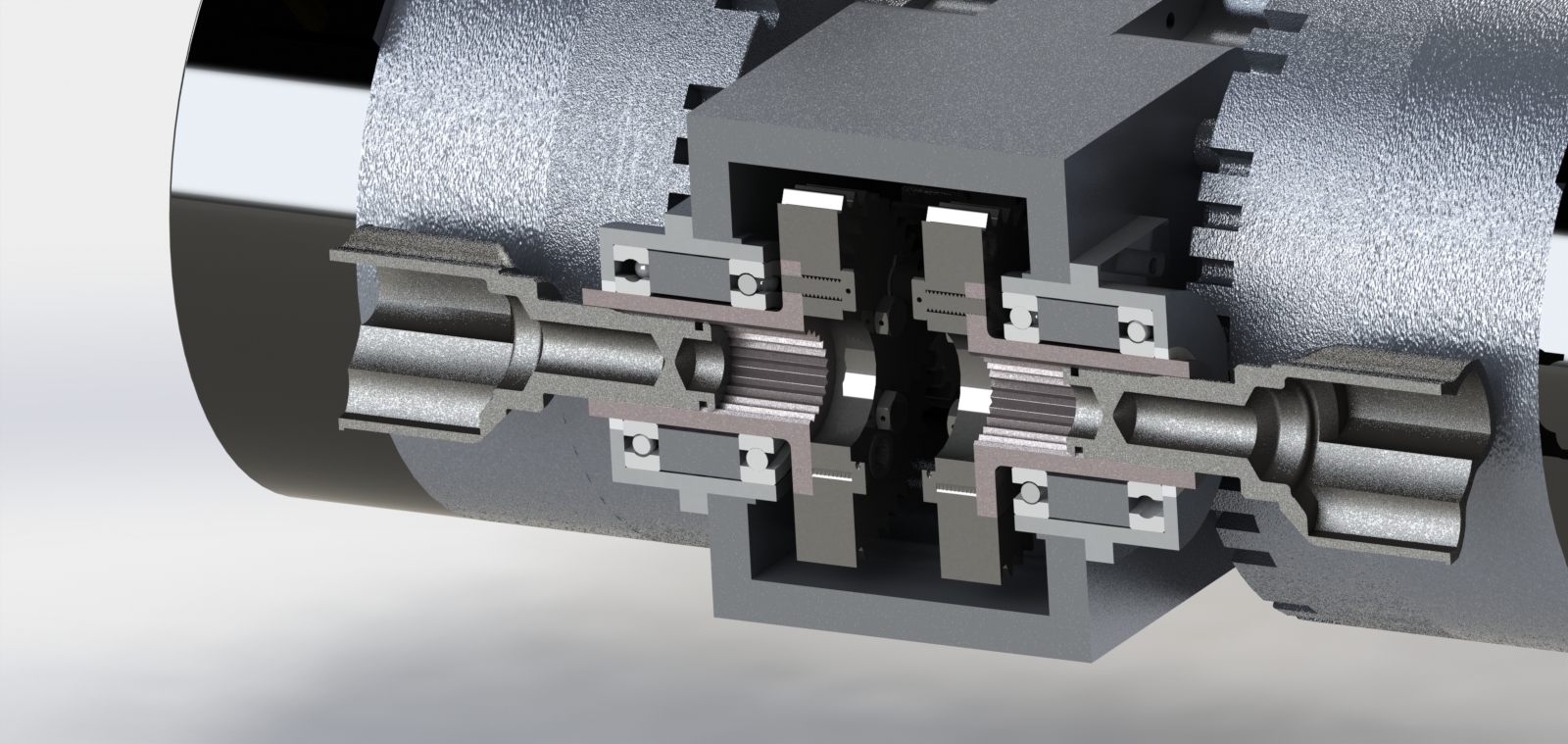
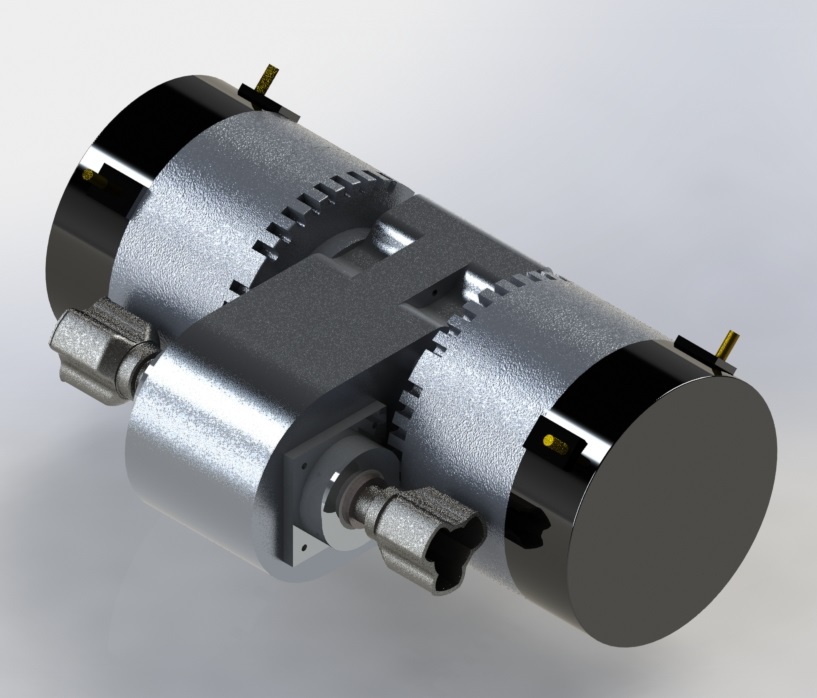
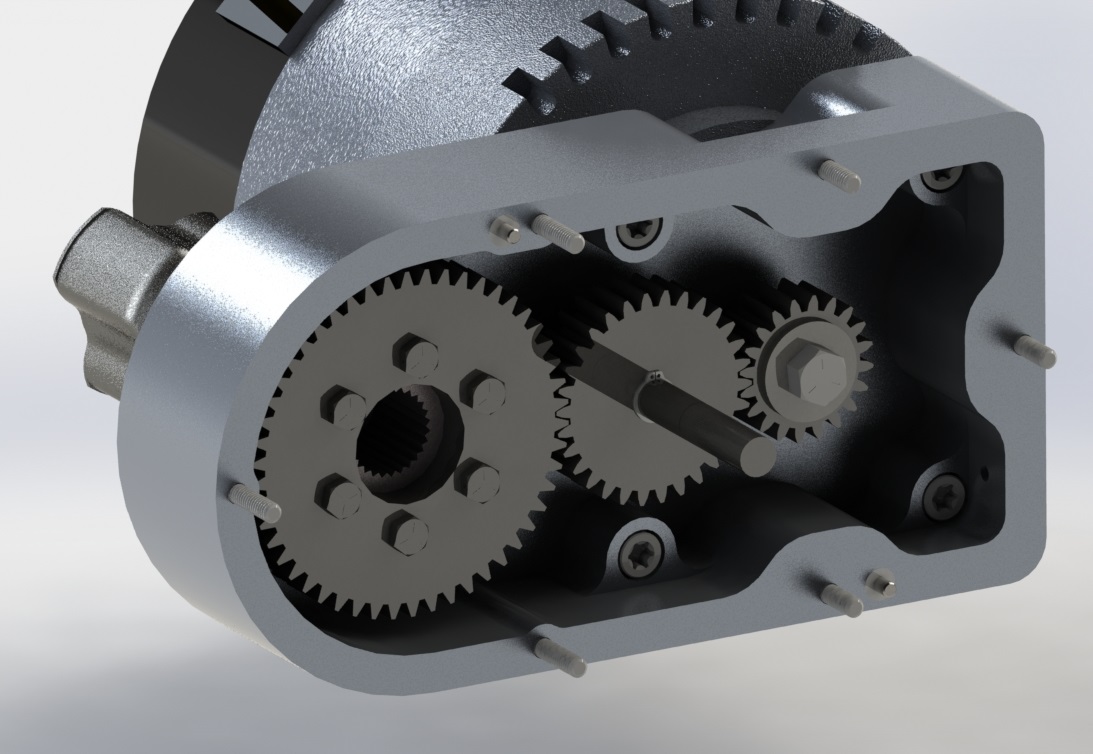
I have worked closely with team members across all components on the car, but my personal projects have included the gearbox, front pushrod suspension, and system integration. Unlike most cars, our Formula car runs two motors instead of a physical differential, prompting the design of a single reduction gearbox mounting both motors and delivering independent drive outputs. To reduce weight, my partner and I designed the gearbox to consist mainly of two machined aluminum housings, mounting a motor and set of gears on each side. It also contains two attached bearing cartridges to resist moments on the cantilevered drive shafts, limited outer dimensions based on billet costs and motor dimensions, and gears designed around vendor availability. The full analysis of the gearbox requires its own design report, but the ongoing project has taught me a lot about a variety of topics, especially oil-sealed components and assembly procedures for large structures. Beyond the gearbox, I will continue to work on all of the Formula car subsystems, providing feedback, designing components that need to be designed, and finishing the details like hardware selection needed for a successful engineering project.
Subteam:
12
Date:
Fall 2014 - Current
Chassis Subteam, Electric Go-Kart Conversion
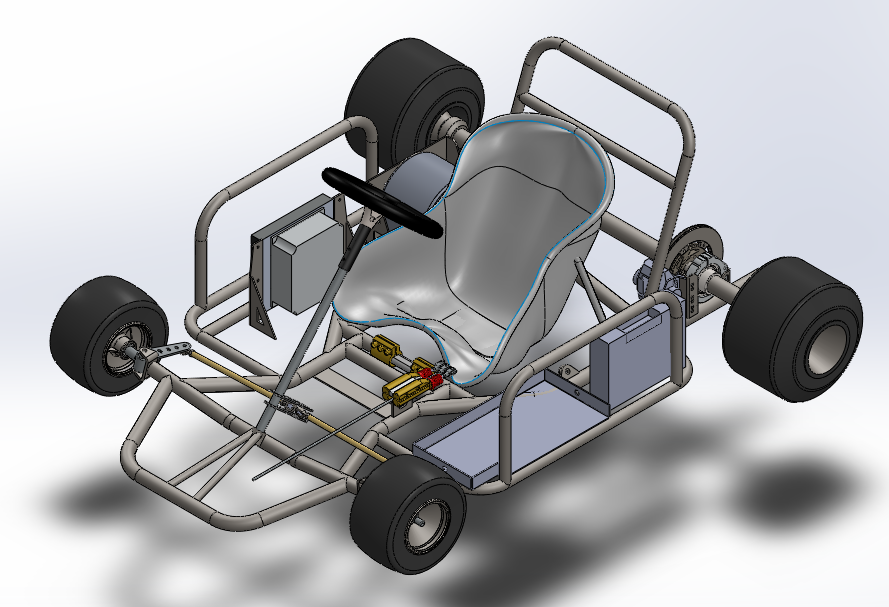
My experience with electric vehicles originated with this go-kart conversion. We planned to convert an abandoned go-kart frame into a racing electric kart for competition, but a search for more challenging work stopped us from moving forward with competition. Instead, we disassembled the go-kart, cleaned the frame, and began work on a full conversion to a Zero motorcycle powertrain. To adapt the chassis to our desired specifications, we needed to modify frame, removing unnecessary members and adding new supports and mounting members. I personally designed the motor controller mount and harness bar currently on the go-kart, providing a stable seat backing and integrated five-point harness mount points. I also designed a full bolt-on roll cage for the go-kart, aiming to meet Purdue EV Grand Prix safety specifications. Due to our move away from competition, though, we never manufactured the full frame.
Subteam:
8
Date:
Fall 2012 - Fall 2013
Steel Welding & Heat Treatment Analysis
Inspired by work on steel space frames used in various vehicle teams at Olin, my team investigated welding and heat treatment strength of steel for our Materials Science class project. Testing MIG welds on 4130 steel taught us about steel both through successful experiments and failed tests. We ultimately tested quenched and tempered steel's toughness compared to air-cooled welds, finding the expected benefits. More importantly, though, we ran several experiments where we welded, heat treated, and machined our steel in the incorrect order, resulting in unnecessary heat treatment or unmachinable metal. Through a variety of tests, I learned far more about steel and its manufacturing processes.
Team:
4
Date:
Spring 2014
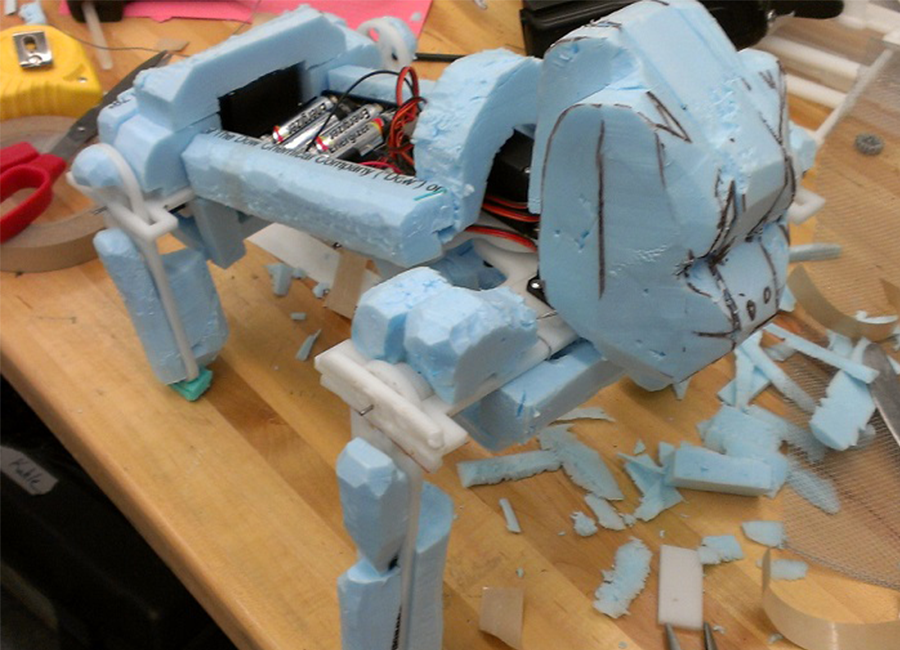
Gorilla-Inspired Game for Fourth Graders
For a target audience of fourth graders, we were challenged to make a nature-inspired game tying in the needs of kids and parents. After deciding on gorilla-inspiration, we decided to create a remote controlled walking gorilla. The gorilla was tied into an educational game where leopards attacked the gorilla's baby as it travelled across a jungle environment. The project was further limited by a strict $50 budget limit except for some provided parts. After designing the gorilla and creating a full jungle backdrop, we ended up with a realistically moving gorilla and an engaging game for the fourth graders who tested our final game.
Team:
5
Date:
Fall 2012
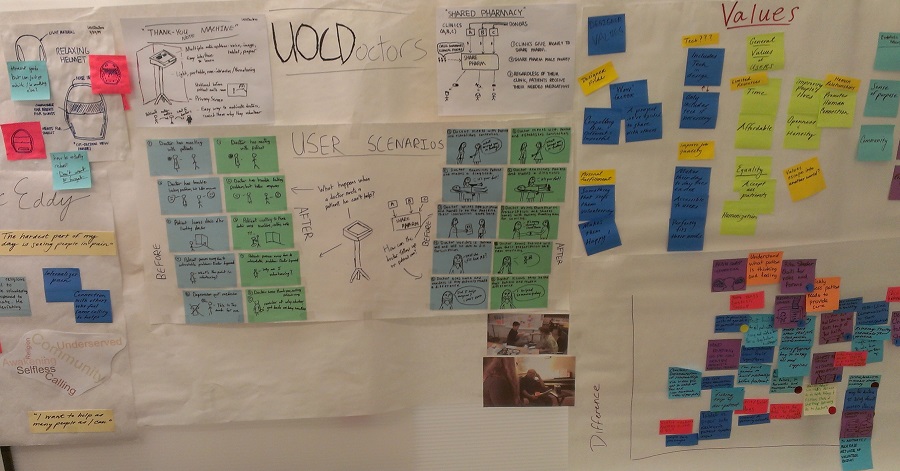
User-Oriented Collaborative Design with Volunteer Doctors
In User-Oriented Collaborative Design my team studied volunteer doctors, aiming to identify and model a useful product or service for the user group. For the first phase of the project we researched how volunteer doctors worked and felt, interviewing numerous volunteers and visiting clinics. After identifying core needs and values of the group, we began to look at areas of improvement for the group. Hours of ideation produced countless product and service ideas, almost all dismissed after some reflection. We then closely worked with doctors again, discussing improvements and useful aspects of ideas. Finally we selected an idea for physical modeling and interface design, thinking about how and where the idea would fit with volunteer doctors. Though we initially thought volunteer doctors would favor better medical technology and supplies, our investigation showed what they really needed was validation for their work, prompting the creation of a subtle new interface for thank-you notes.
Team:
5
Date:
Spring 2014
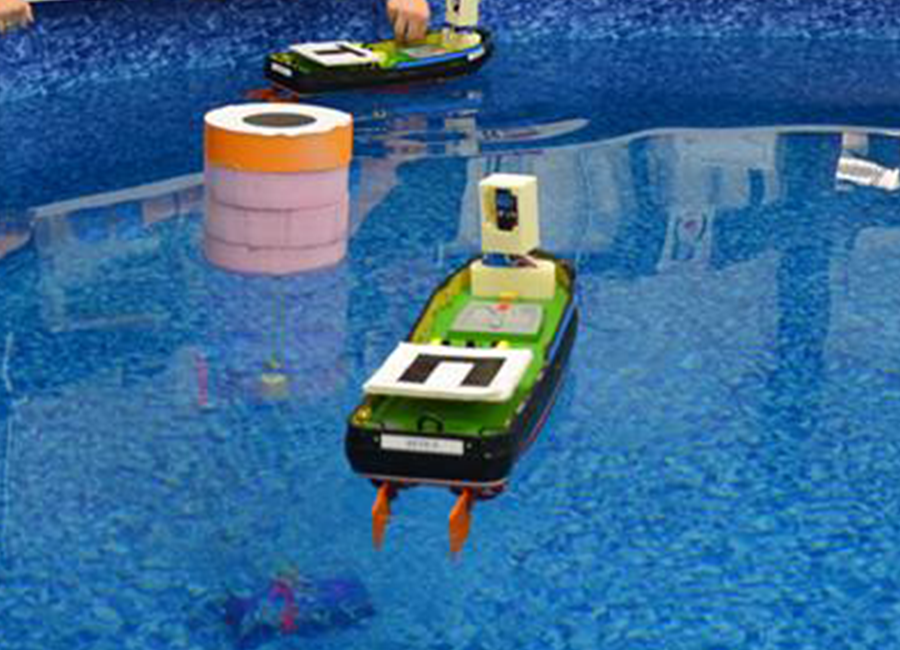
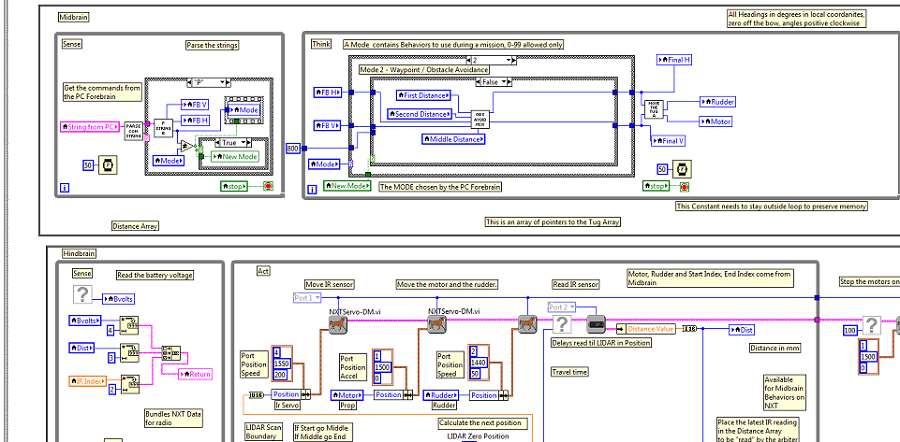
Autonomous Robot Tugboat Navigation
Challenged to write code for autonomous tugboat, my Robotics team dealt with a variety of issues from a curious mix of sensors. The tugboat needed to navigate around a course using a boat-mounted IR sensor and an external, over-hanging camera. Though working closely with the Forebrain team governing overall navigation with the overhead camera, I primarily wrote the Hindbrain code present on the boat. The processing speed of the boat acted as a bottleneck to communication with the camera base station, so I spent time optimizing the code for quicker response. In addition, I created and implemented algorithms for wall avoidance, wall following, and balancing local IR obstacle data with commands from the base station.
Team:
5
Date:
Fall 2013
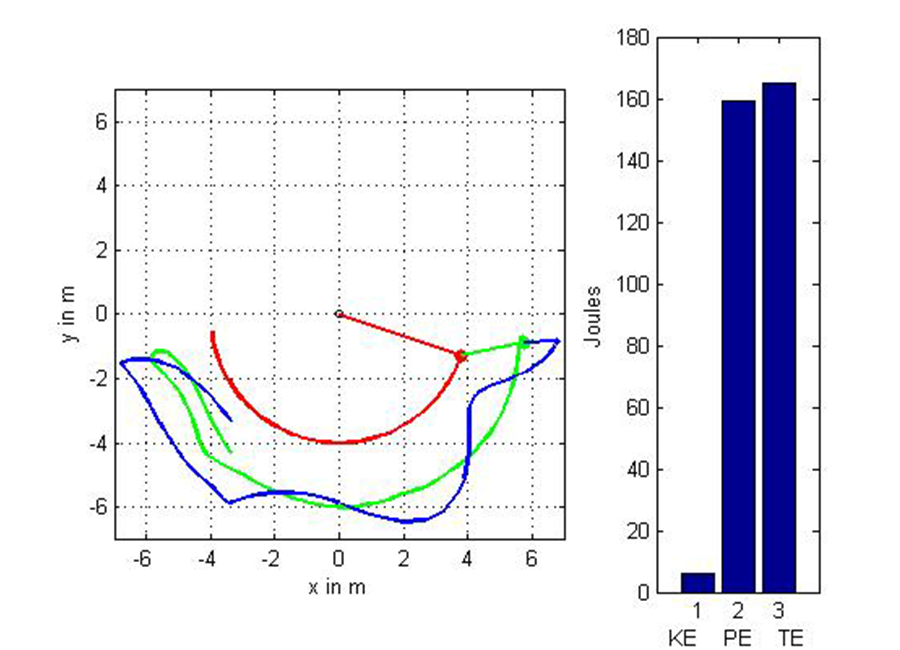
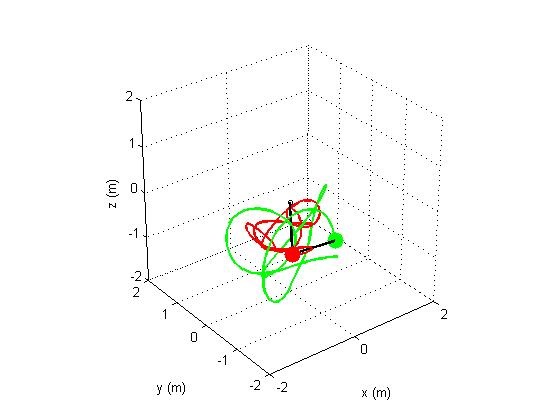
Dynamic Equation Generator
For my Dynamics final project, my partner and I wanted to explore the use of MATLAB and the symbolic toolbox to better understand its capabilities. We used MATLAB to automatically derive the equations of motion for two known systems, a planar rigid body and spherical point mass pendulum, solving force balance equations and taking unit vector derivatives in MATLAB. I primarily wrote the code, reverse engineering a similar script deriving a double pendulum's motion. Afterwards, we determined the changes needed to adapt the system to an n-member pendulum for the two cases above, then adapted our equation generator and simulation.
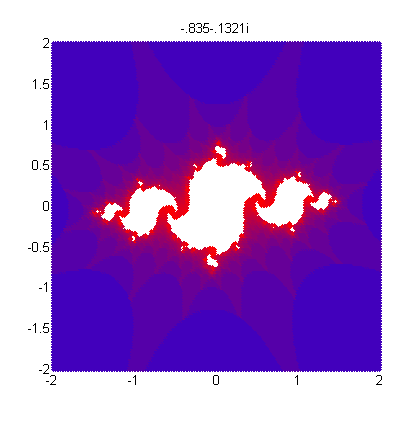
A personal interest of mine, I have studied chaos and nonlinear dynamics both in class and personally. I have written several other MATLAB simulations exploring both existing chaotic systems as well as created ones.
Team:
2
Date:
Fall 2013
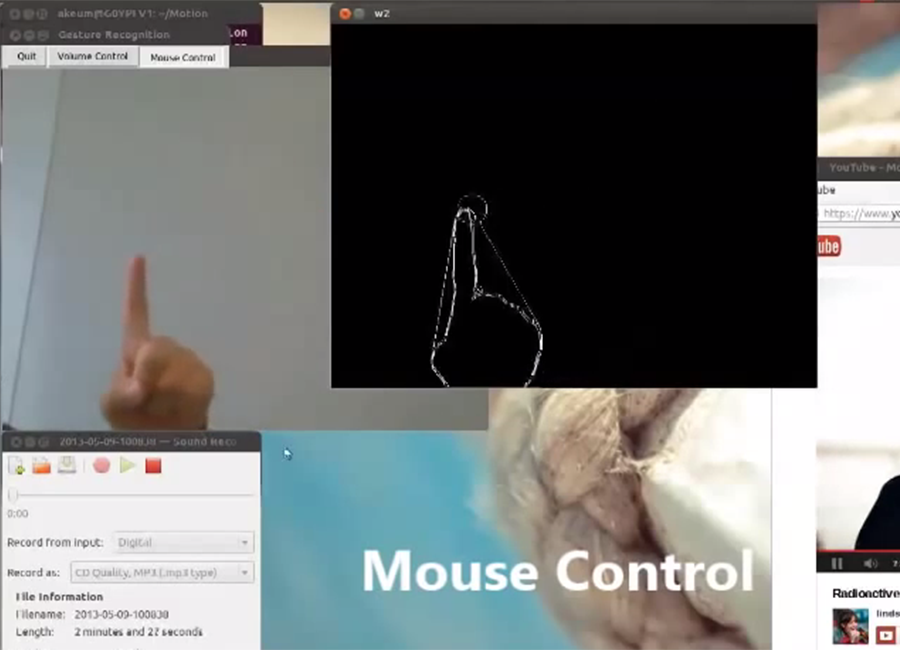
Webcam Hand-Gesture Computer Control
My team and I created a hand gesture-controlled computer interface for our Software Design class. Using the OpenCV module in Python, we integrated mouse pointer movement, basic clicking and dragging, and computer volume control in one program. I worked on the actual hand gesture recognition, isolating the hand through skin color detection, finding convex hull defects to separate the fingers, and tracking the position and number of defects to measure hand gestures.